El principio básico del acelerómetro (como el de otros sensores) depende de un sistema de masas y resortes. La tensión y la fuerza en resortes está descrita por la ley de Hooke. Esta ley propone: ``la fuerza de resistencia o la fuerza para establecer la posición de equilibrio en un resorte, es proporcional a la cantidad de fuerza al estirarlo o comprimirlo.''
Además de la ley de Hooke, los acelerómetros también están basados en
la segunda ley de Newton que relaciona la fuerza con masa y
aceleración. Esto implica que un sistema acelerado producirá una
fuerza de acuerdo a la relación ![]() La fuerza hace que el resorte
en el acelerómetro (o materia elástica), se expanda o se
comprima. Nótese que la aceleración ocurre solo en un sentido y por lo
tanto para que el acelerómetro mida movimientos en un plano, se
necesita duplicar el sistema en una dirección perpendicular a la
original.
La fuerza hace que el resorte
en el acelerómetro (o materia elástica), se expanda o se
comprima. Nótese que la aceleración ocurre solo en un sentido y por lo
tanto para que el acelerómetro mida movimientos en un plano, se
necesita duplicar el sistema en una dirección perpendicular a la
original.
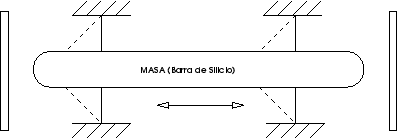
En la implementación de Analog Devices (ADXL250) que es un acelerómetro popular, se utiliza el principio de capacitancia para medir el desplazamiento de un sistema elástico que consiste en una barra de silicio sujetada por cuatro hilos. A esta configuración se adicionan tres placas metálicas que forman dos condensadores. La placa de la mitad cambia la distancia entre las placas de los extremos (ver figura 4).
El principio de capacitancia se utiliza para almacenar energía y los
condensadores son los dispositivos electrónicos utilizados en este
fenómeno. Un condensador consiste de dos placas de metal paralelas. La
cantidad o capacidad de almacenar carga eléctrica depende del material
que se ponga entre éstas, además de la separación entre las dos. La
capacitancia está dada por
![]() donde
donde ![]() es el
coeficiente del material y
es el
coeficiente del material y ![]() la separación entre las placas.
la separación entre las placas.
Esto significa que en el ADXL50, los cambios en capacitancia están dados por la diferencia (o movimiento) entre las placas de los extremos y la placa del centro. El movimiento de la placa central depende de la barra de silicio anclada en los cuatro extremos.
![]()
© Copyright 2005-2006, artElab- Maginvent.ORG. All Rights Reserved, Derechos Reservados.